Centipede RTK: Ingyenes centiméteres pontosság mindenkinek
Ha a hosszabb bevezető helyett azonnal a kapcsolódási paraméterek érdekelnek, kattints ide.
Mi is az az RTK?
A hagyományos műholdas helymeghatározás (GPS, illetve pontosabban GNSS) általában néhány méteres pontosságot biztosít. Ez sok hétköznapi felhasználásra bőven elegendő, azonban a precíziós mezőgazdaságban vagy a földmérésben gyakran ennél jóval pontosabb pozícióra van szükség.
Az RTK (Real Time Kinematic) egy olyan technológia, amely képes a műholdas helymeghatározás pontosságát néhány méterről akár 1–2 centiméterre javítani. Ehhez egy ismert, pontos koordinátájú bázisállomás folyamatosan méri a műholdak jeleit, majd kiszámítja a hibákat és korrekciós adatokat küld a felhasználók (úgynevezett roverek) számára.
A rover – például egy drón, traktor vagy GNSS vevő – ezeket a korrekciókat felhasználva jelentősen pontosabb pozíciót tud meghatározni valós időben.
Ez a pontosság sok esetben kritikus. Jó példa erre a mezőgazdasági drónos permetezés: a repülési útvonalak gyakran egymás mellett, néhány méteres sávokban haladnak. Ha a pozíció csak 2–3 méteres pontosságú lenne, könnyen előfordulhatna kihagyás vagy túlpermetezés. Az RTK segítségével azonban a drón centiméteres pontossággal képes tartani a pályát, így a kijuttatás egyenletesebb és hatékonyabb.
Hasonlóan fontos a centiméteres pontosság az automata traktor-kormányzásnál, a precíziós vetésnél vagy a térképezési feladatoknál is. Az ilyen rendszerek működéséhez elengedhetetlen egy megbízható RTK korrekciós hálózat – pontosan ilyen a Centipede is.

Centipede RTK
Sokáig a centiméteres pontosságú RTK korrekció a méregdrága előfizetések és a zárt gyártói ökoszisztémák világa volt. Ezt változtatta meg egy francia kezdeményezés, a Centipede RTK.
A projekt az INRAE (Francia Nemzeti Mezőgazdasági Kutatóintézet) falai közül indult 2019-ben azzal a kifejezett céllal, hogy a precíziós technológiát demokratizálja. A hálózat alapfilozófiája az Open Source (nyílt forráskód) és Open Data (nyílt adatok): a szoftveres háttér bárki számára hozzáférhető, a használat pedig teljesen ingyenes.
Néhány éve még egy RTK bázisállomás kiépítése könnyen milliós tétel lehetett. Az új generációs GNSS chipek (például az u-blox F9P) azonban jelentősen lecsökkentették a költségeket, így ma már akár egy gazda vagy egy hobbista is képes saját állomást telepíteni.
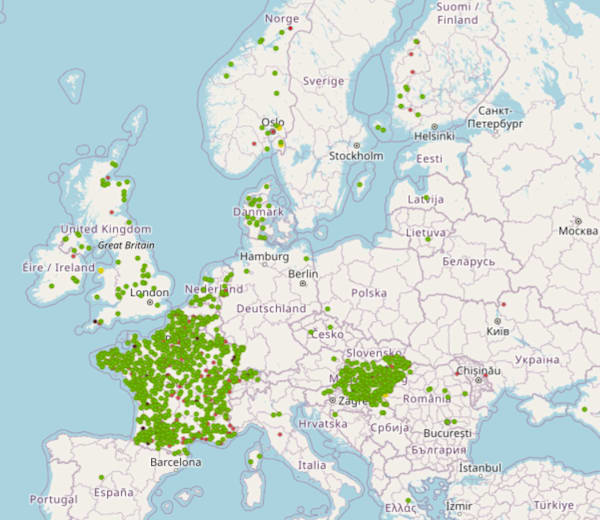
A „centipede” angolul százlábút jelent. A projekt neve arra utal, hogy a hálózat sok apró állomásból áll, amelyek együtt alkotnak egy nagy rendszert. A hálózat lényege, hogy sok kisebb, olcsó állomás együtt ad országos lefedettséget.
A magyar aktivitás
Magyarország külön érdekesség a projekt történetében. Hazánkban kevesebb mint két év alatt teljes országos lefedettséget sikerült elérni a helyi gazdák összefogásának köszönhetően, akik több mint száz bázisállomást telepítettek.
A magyar Centipede hálózat egyik legerősebb motorja az AgOpenGPS közösség. Ez egy open-source traktor-autokormány rendszer, amely olcsó hardverrel működik, RTK pontosságot igényel, és egy rendkívül aktív DIY közösség épült köré.
Ha részletesebben érdekel ez a téma, akkor az alábbi oldalakon érdemes elindulnod:
- https://agopengps.hu/
- https://www.youtube.com/@AgOpenGPSMagyarorszag
- https://www.facebook.com/groups/agopengpshun
Ha saját bázisállomás telepítésén gondolkodsz, érdemes felvenni a kapcsolatot az AgOpenGPS közösséggel – akár kész megoldást keresel, akár saját magad szeretnéd megépíteni az állomást.
Megbízhatóság
A rendszer egyik fontos sajátossága, hogy a bázisállomások egymástól függetlenül működnek. A bázisok NTRIP kapcsolaton keresztül küldik a GNSS mérési adatokat a caster szerver felé, amely ezeket továbbítja a rovereknek. A rover mindig egy konkrét bázisállomás korrekcióját használja, így egy hibás állomás nem befolyásolja az egész hálózatot. Legfeljebb azok a felhasználók kapnak pontatlan korrekciót, akik éppen azt az egy állomást használják.
A bázisállomások működését ugyanakkor figyelik. Az állomás üzemeltetőjének regisztrálnia kell a hálózatba, az állomás pedig folyamatosan adatot küld a caster felé. Ha egy állomás hibás adatot szolgáltat, instabilan működik vagy rossz koordinátákat használ, akkor egyszerűen eltávolítják a nyilvános listából. A hibás működés a gyakorlatban is gyorsan észrevehető, mert a rover nem kap stabil RTK fix megoldást.
Az RTK pontossága nem állandó: a bázisállomástól távolodva fokozatosan romlik. Ez azt jelenti, hogy míg a bázis közvetlen közelében 1–2 centiméteres a pontosság, egy 50–60 kilométerre lévő állomás esetén ez akár 5–10 centiméter is lehet.
Mezőgazdasági drónozásnál (permetezésnél) ez az 5–10 centis eltérés általában még elfogadható, hiszen a szóráskép szélessége ennél jóval nagyobb, így nem keletkezik kezeletlen sáv. Ráadásul az RTK rendszerek egyik nagy előnye a jó relatív pontosság: a pozíció ugyan néhány centiméterrel eltolódhat a valós koordinátához képest, de a rendszer egymáshoz képest nagyon stabilan tartja a repülési sávokat, ezért a menetek nem csúsznak el egymáshoz képest. Azonban ha centiméterre pontos térképezés vagy határvonal-kitűzés a cél, törekedjünk a 20 km-en belüli bázis használatára.
A NEAR mount point automatikusan a legközelebbi elérhető állomást választja ki, így ezt legtöbbször nem kell manuálisan kezelni – feltéve, ha az eszközünk képes a megfelelő formátumban elküldeni a saját pozícióját. A ma kapható RTK-s DJI drónok esetén ezzel nem lesz gond.
Érdemes megjegyezni, hogy míg 20 km-en belül a FIX elérése gyakran 5–10 másodpercen belül megtörténik, 60 km-nél ez akár 1–2 percig is eltarthat.
Kapcsolódás
A kapcsolódáshoz szükséges NTRIP adatok: (forrás)
- Caster address: crtk.net
- Port: 2101
- Mount point: NEAR (vagy megadhatod konkrétan a közeledben lévő állomás azonosítóját)
- Login: c vagy centipede
- Password: c vagy centipede
- Format: RTCM3
(Sok eszköznél a felhasználónév és jelszó megadása kötelező. A Centipede hálózat azonban nem használ valódi hitelesítést a rover kliensek számára, ezért ezek az adatok általában nincsenek ellenőrizve. A „c” vagy „centipede” értékek inkább csak konvencióként terjedtek el, hogy az ilyen mezőket kötelezően kitöltő szoftverekkel is működjön a kapcsolódás.)